NavLIS - Navigační skupina laboratoře Leteckých Informačních Systémů
Katedra měření
Technická 2, 160 00 Praha 6
Tel.: 224 352 191, Fax: 233 339 929
http://measure.feld.cvut.cz/groups/lis/
Kdo jsme?
![]() Ing. Jan Roháč, Ph.D.
Ing. Jan Roháč, Ph.D.
Koordinuje výzkum a činnosti prováděné v rámci NavLIS skupiny zaměřené na návrh a realizaci navigačních systémů a jejich měřicích jednotek. Činnosti zahrnují nejenom návrh HW, ale i návrh modelů, algoritmizaci zpracování a fúze dat a zpracování analogových signálů.
![]() Ing. Martin Šipoš
Ing. Martin Šipoš
Zabývá se kalibrací inerciálních senzorů, magnetometrů a náklonných senzorů, zpracováním dat z inerciální a náklonných senzorů, magnetometrů a GPS, algoritmizací a fúzí dat pomocí Kalmanovy filtrace.
![]() Ing. Jakub Šimánek
Ing. Jakub Šimánek
Zabývá se zpracováním a validací dat a navigačními algoritmy pro bezpilotní prostředky. Pracuje na fúzi dat inerciálních senzorů, GPS a odometrie s využitím především Kalmanovy filtrace.
![]() Ing. Mushfiqul Alam
Ing. Mushfiqul Alam
Zabývá se přístupy adaptivního zpracování dat v řídicích systémech, zajímá se o rozšíření teorie řízení do letectví v podobě flexibilních letadel a helikoptér. V současné době pracuje na navádění pilota na přistání s využitím SAR technologie.
![]() Ing. Miroslav Strob
Ing. Miroslav Strob
Zabývá se zpracováním dat z inerciálních senzorů a magnetometru pomocí Kalmanovy filtrace. Pracuje na implementaci navržených algoritmů do FPGA za účelem rychlých výpočtů navigační úlohy.
![]() Bc. Marek Bílý
Bc. Marek Bílý
Zabývá se vývojem systémů sběru dat pro navigační jednotky a implementací digitálního zpracování navigačních dat.
Jakým výzkumem se zabýváme?
- Kalibrace inerciálních senzorů (tříosé akcelerometry, tříosé senzory úhlových rychlostí), kalibrace senzorů náklonu (elektrolytické libely, inklinometry) a magnetometrů.
- Teplotní kalibrace inerciálních senzorů a senzorů náklonu, magnetometrů. Testování senzorů na vliv vibrací.
- Určování orientace (příčný náklon, podélný sklon, kurz) a pozice v prostoru na základě fúze dat z dostupných měřicích subsystémů, tj. inerciálních senzorů, magnetometru, náklonoměrů, odometrů a GNSS. Aplikace zaměřené na malá letadla, pozemní mobilní jednotky, bezpilotní či robotické prostředky, hand-held zařízení, apod.
- Vývoj algoritmů pro rychlé výpočty navigační úlohy určené ke sledování pohybu objektů s vysokou dynamikou.
- Vývoj algoritmů pro navigační účely s minimalizací vlivu vibrací a rozpoznáváním dynamiky.
- Vývoj algoritmů pro validaci měřených dat.
- Vývoj algoritmů pro detekci anomálií v senzorických datech.
- Návrh inerciálních navigačních systémů a jednotek s netradičním uspořádáním senzorů.
K čemu to je
Výzkum, kterým se zabývá Navigační skupina pracující v rámci laboratoře Leteckých Informačních Systémů (dále jen NavLIS), která je součástí Katedry měření, má za hlavní cíl zvyšování bezpečnosti v civilním sektoru z pohledu řádně prováděných navigačních úloh v aplikacích zaměřených na pozemní i letecké prostředky. Tudíž naším cílem je zvyšovat přesnost prováděných navigačních úloh a to nejen z pohledu 3D pozice, ale i orientace definované Eulerovými úhly či kvaterniony. Algoritmy pro výpočet zmíněných parametrů jsou již dlouhá léta teoreticky známy, praxe však bývá složitější a to z pohledu rozdílné dynamiky a aplikace, vlivu prostředí na měřicí systémy a nedokonalosti použitých měřicích systémů či senzorů. V rámci NavLIS se snažíme ve vývoji daných algoritmů tyto aspekty zahrnout a tak minimalizovat jejich vliv na přesnost vyhodnocení. Aplikovatelnost námi navržených a realizovaných jednotek je široká. Naše navigační jednotky mohou být nasazeny na prostředcích jak leteckých, tak i pozemních, sloužících např. při povodních a požárech pro vyhodnocení přehledové situace, pro monitorování pozemních objektů, při záchranných akcích jako naváděcí systém helikoptér, zvýšení bezpečnosti kritických infrastruktur (energetická zařízení, chemický a jaderný průmysl, muniční sklady), ochrana letišť, záložní systém pro vybrané úkoly řízení letového provozu, atd.
Na čem konkrétně pracujeme
Modulární systém pro určování pozice a orientace v prostoru
Na tomto projektu se sice již pracovalo v roce 2010-2012 v rámci interního grantu ČVUT SGS10/288/OHK3/3T/13, ale jedná se stále o aktuální téma, které je nutné rozvíjet a případně i vylepšovat. Práce tudíž pokračují. V rámci dovršeného projektu byly navrženy nové postupy pro komplexní zpracování senzorových signálů a dat a nová struktura heterogenního multisenzorového systému, viz obr. 1, které vedly k zásadnímu zvýšení přesnosti určení pozice a orientace s využitím běžných cenově přijatelných senzorů. Pro experimentální ověření vyvinutých algoritmů a hardwarových konceptů byl vyvinut integrovaný systém s modulární strukturou využívající senzorových bloků a dalších měřicích subsystémů. Systém integruje pro dosažení požadované přesnosti údaje pomocí adaptivní fúze dat v podobě Kalmanovy filtrace. Modulární struktura s centrálním řízením umožňuje propojení následujících subsystémů: IMU (inerciální měřicí jednotka) jako primárního systému, dále systému GPS přijímače, ADC (Air Data Computer - aerometrický měřicí systém), elektrolytických libel, magnetometru a ultrazvukových senzorů. Celý modulární systém v plné konfiguraci byl ověřen na bezpilotním prostředku Bellanca Super Dectahlon XXL od firmy Hacker Model Production s.r.o., viz obr. 1.

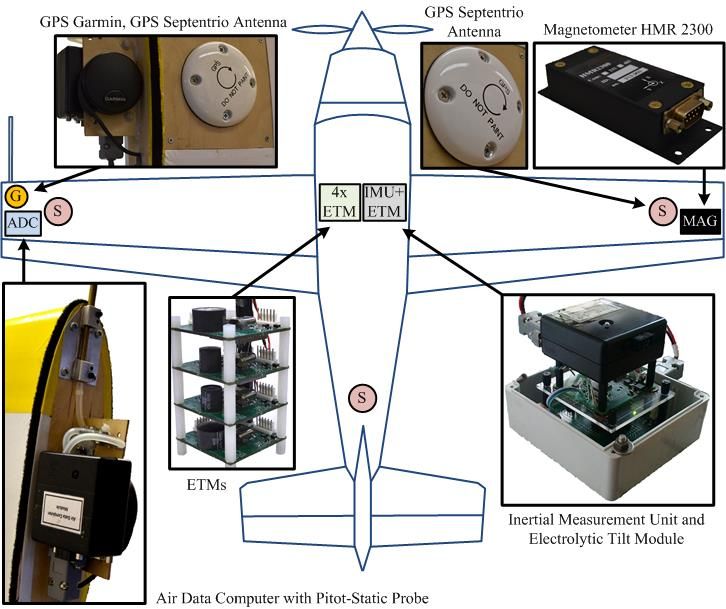
Obr. 1 - Bezpilotní prostředek (vlevo), modulární systém pro přesné měření pozice a orientace (uprostřed), uspořádání senzorů na bezpilotním prostředku (vpravo)
Výzkum a vývoj technologií pro radiolokační mapovací a navigační systémy
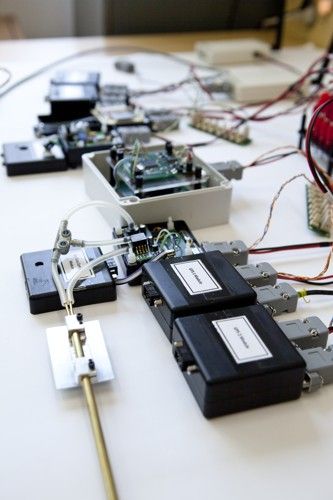
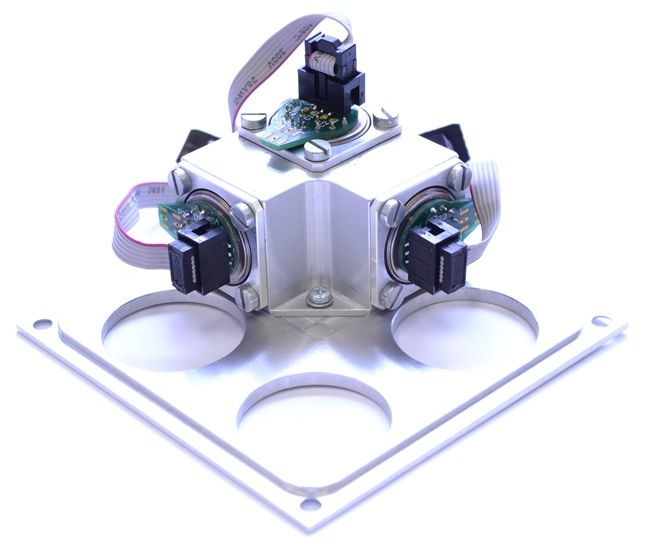
Projekt je řešen v rámci projektu TAČR s číslem TA02011092. Zaměřuje se na výzkum a vývoj systému radaru, jehož základní funkce je založena na principu SAR (Synthetic Aperture Radar) doplněném o navigační jednotku (NAV), která tak se SAR tvoří ucelený systém aplikovatelný na palubách helikoptér či letadel. Základní funkcí projektu je integrace SAR a NAV, čímž vznikne unikátní systém plnící funkci kontinuální navigace (aktuální pozice, rychlost a orientace v prostoru) při současném získání obrazu terénu a scény za nepříznivých podmínek, kde stávající monitorovací a mapovací systémy již nefungují (mraky, mlha, kouř, atd.). To jde s výhodou využít např. pro monitorování urbanistických změn krajiny, či pro zajištění bezpečného přistání helikoptéry za nulové viditelnosti. NAV vychází z použití inerciální měřicí jednotky, viz obr. 2, obr. 3, ke které jsou připojitelné externí přijímač GPS a magnetometr. Jelikož získaný obraz ze SAR, příklad na obr. 4, může být použit pro zpřesnění navigační úlohy, je plánována rovněž integrace SAR a INS pomocí adaptivních algoritmů Kalmanovy filtrace. Unikátnost tohoto řešení bude v tom, že daný systém bude měřit a vyhodnocovat všechna data na palubě letadla či helikoptéry a poskytovat pilotovi důležité informace jak o místě přistání, tak i pro samotnou pilotáž.
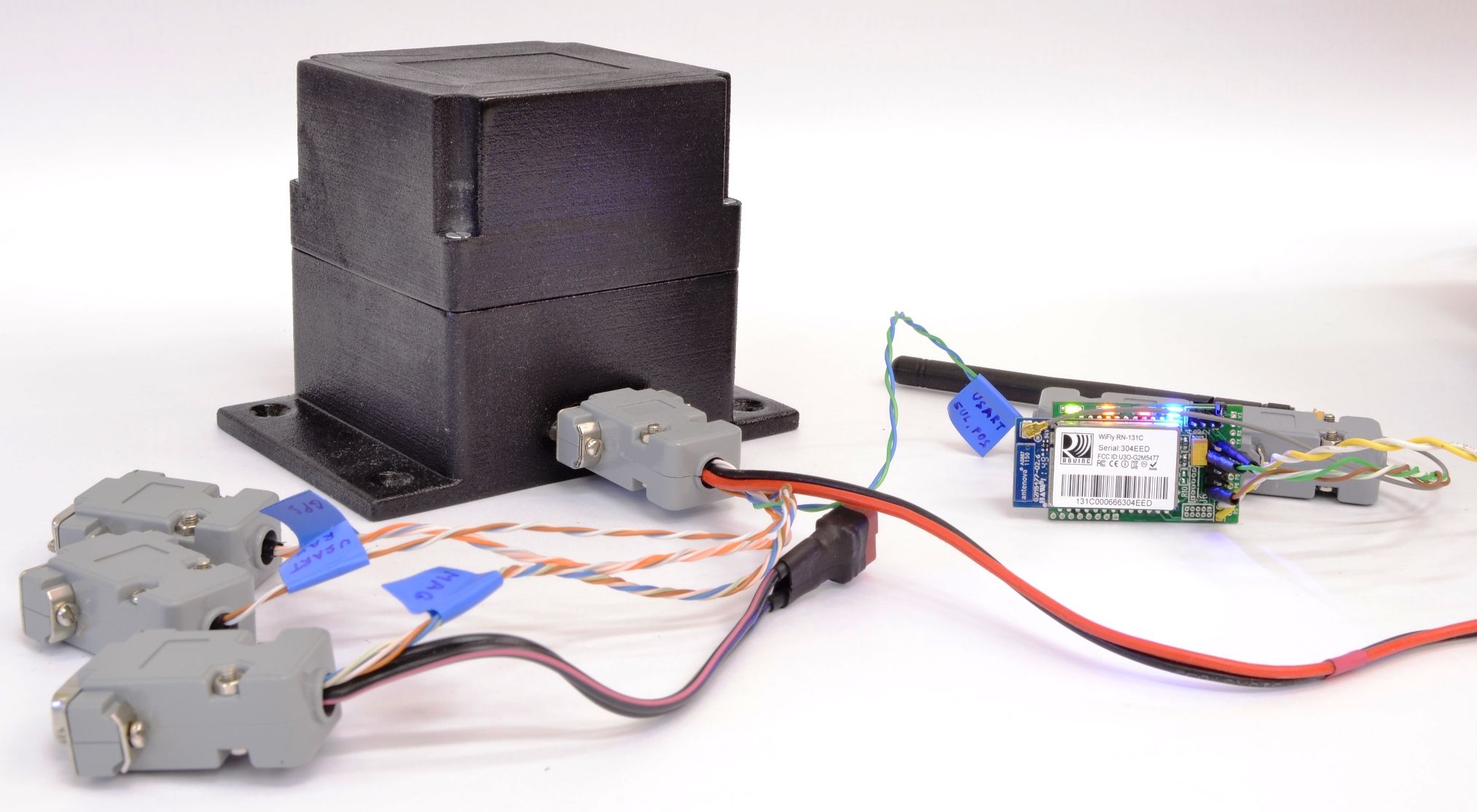

Obr. 2 - Navigační systém umožňující připojení externího magnetometru a GPS přijímače s wi-fi modulem (vlevo), systém umělého horizontu zobrazený na tabletu s operačním systémem Android (vpravo)
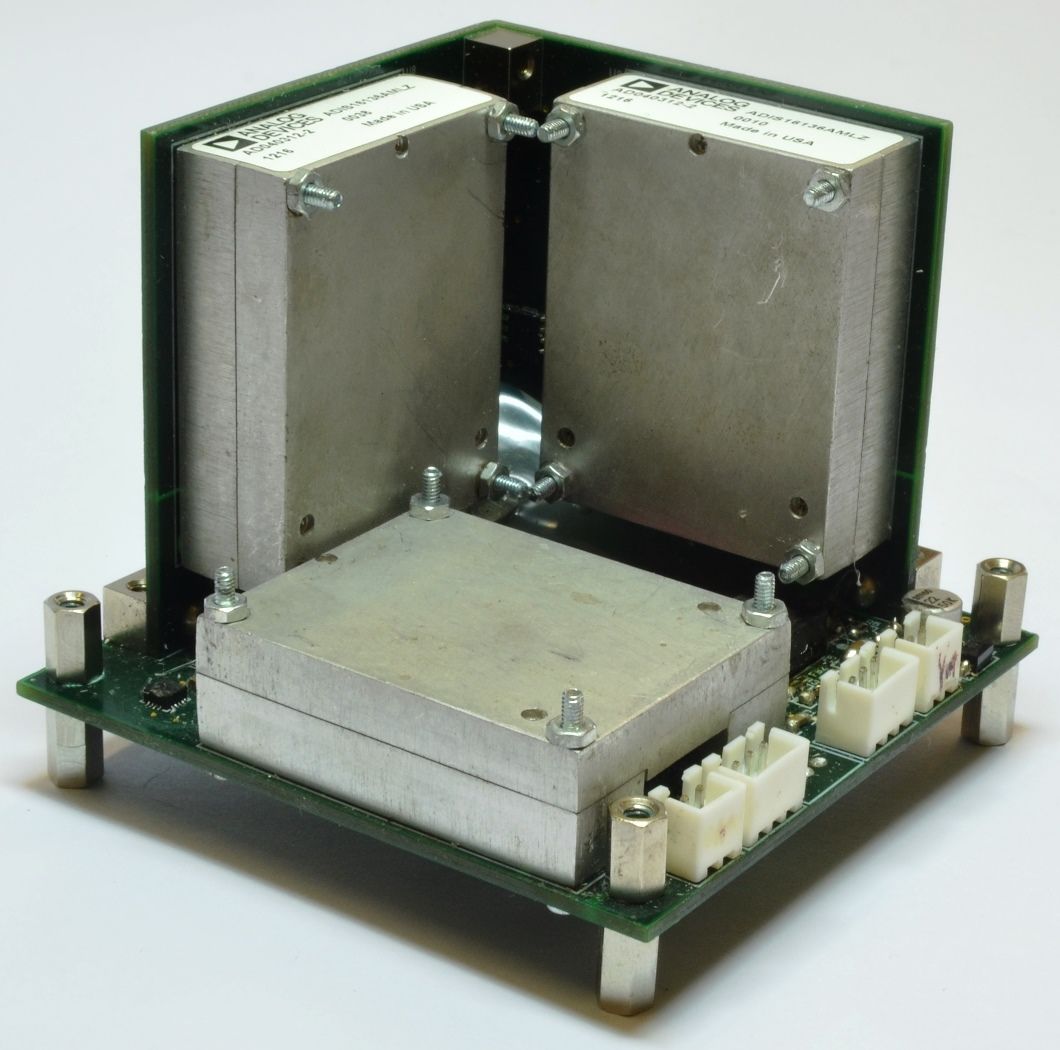
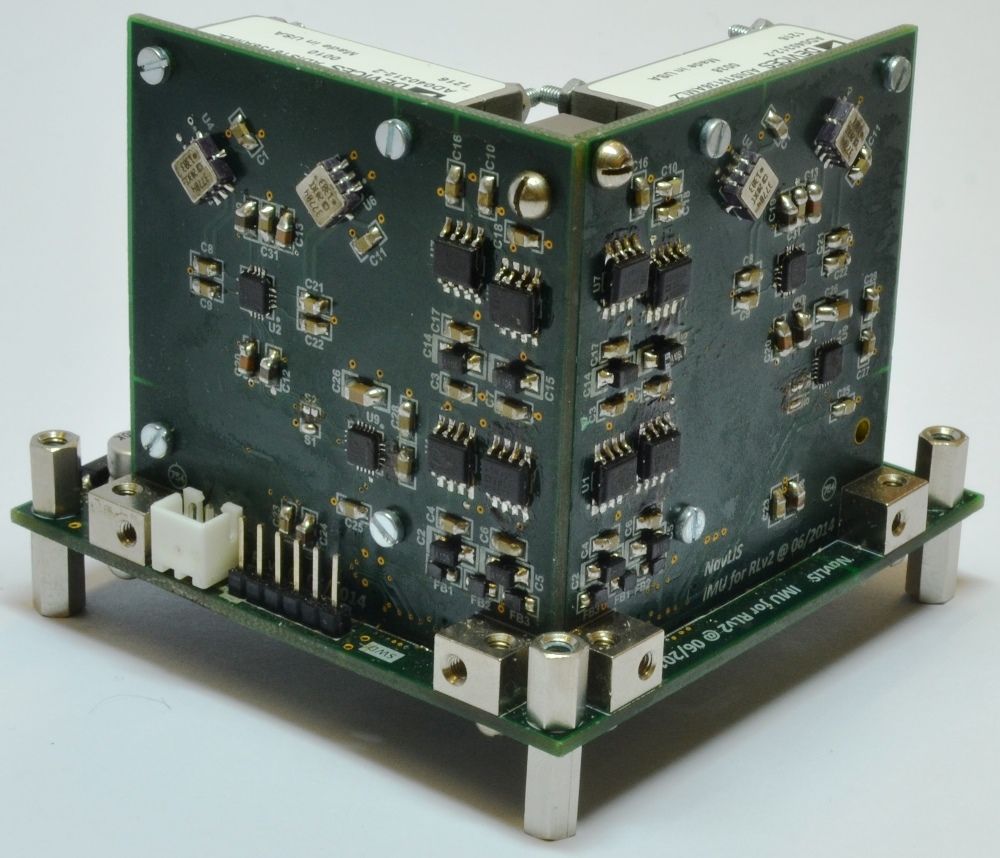
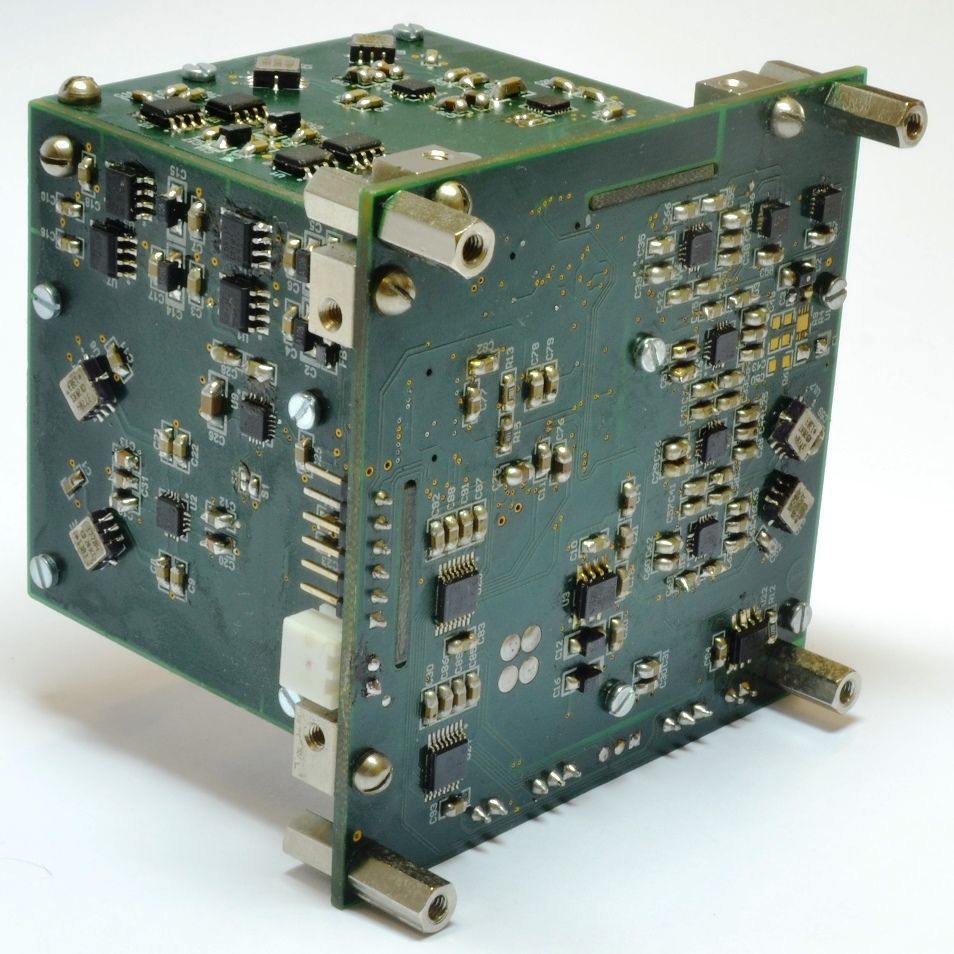
Obr. 3 - Multi-senzorová inerciální měřicí jednotka s modifikovanou strukturou akcelerometrů
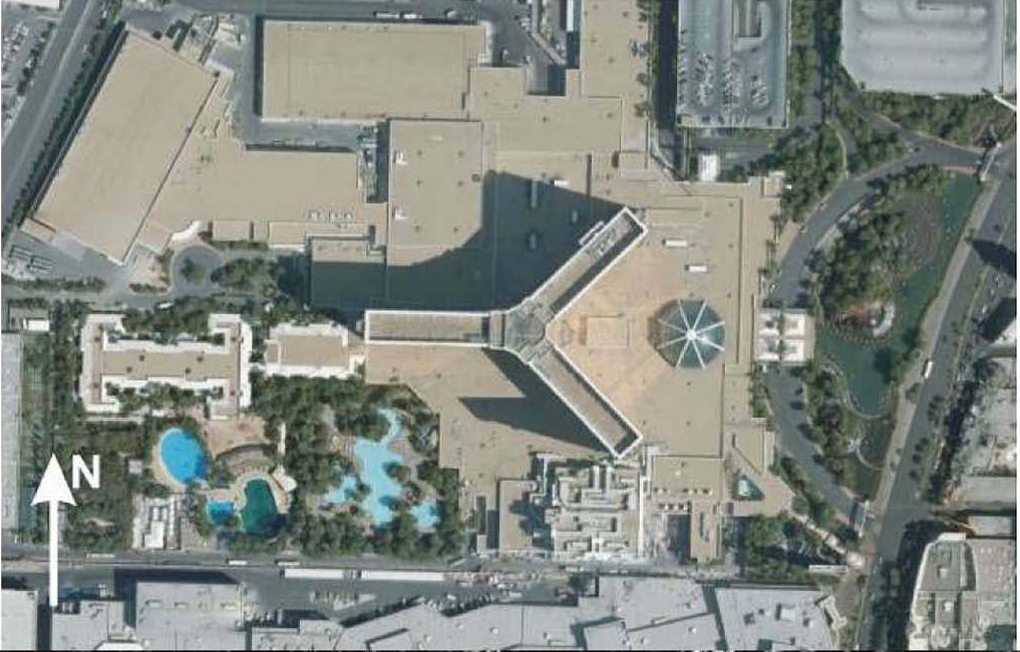

Obr. 4 - Reálná scéna (vlevo) nasnímaná SAR radarem (vpravo)
Využití dvoustaničního dálkoměrného systému pro ochranu perimetru
V rámci projektu Ministerstva vnitra s číslem VG20122015076 je řešena problematika využití principu dvoustaničního dálkoměrného systému (DDS) s vodorovnou základnou pro ochranu strategické infrastruktury. Bude navržen a ověřen speciální pasivní senzorický systém využívající kamerových jednotek, které umožní implementaci principu DDS při splnění podmínky, že cíl bude pozorovatelný současně alespoň dvěma kamerami. Systém umožní přesné měření souřadnic cíle (definované v UTM či WGS 84), jeho vektoru rychlosti a extrapolaci dráhy cíle včetně přenosu dat uživatelům. Projekt je zaměřen na problematiku měření polohy pozemních a vzdušných cílů (nízkoletící bezpilotní prostředky, ultralighty, sportovní letadla atd.) do šikmé vzdálenosti cca 3000 m. Systém bude schopný poskytovat přesnou polohu cíle (1 m) pro činnost efektorů cca 30 sekund před příletem cíle k objektu resp. perimetru. Základní uspořádání systému je patrné na obr. 5. Naším cílem kromě jiného je i vývoj systému přenosu dat a napájení, zastaničení celého systému a tvorba uživatelského rozhraní.
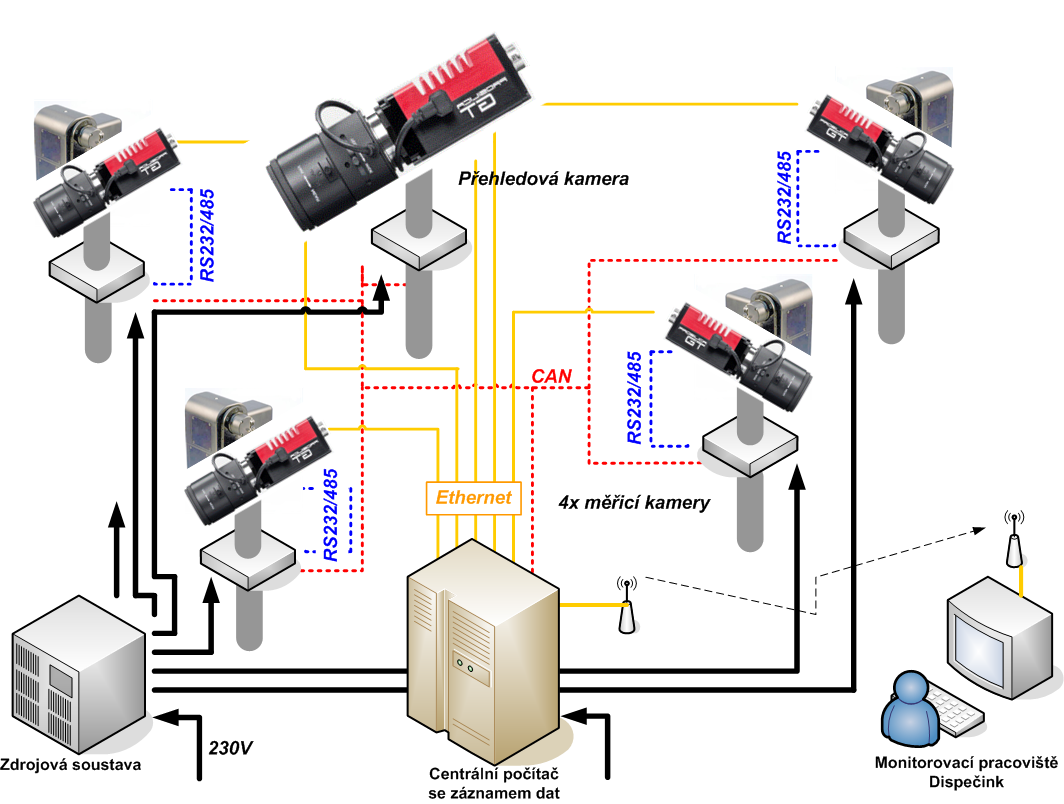
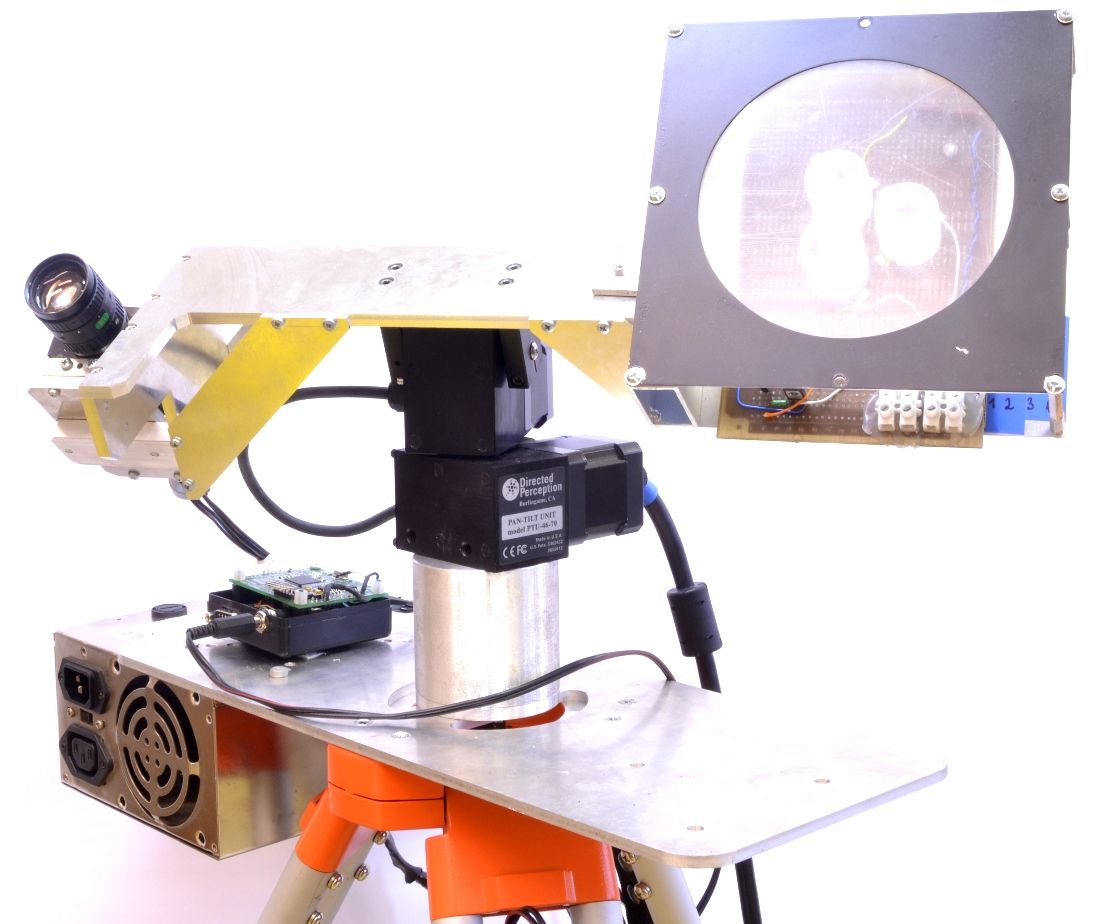

Obr. 5 - Dvoustaniční pasivní dálkoměrný systém pro ochranu perimetru koncepce (vlevo), stativ s polohovacím zařízením Pan&Tilt, kamerovou a řídicí jednotkou a zaměřovacím terčem (uprostřed), detail kamerové jednotky a Pan&Tilt (vpravo)
Moderní metody ve vývoji inerciálních navigačních systémů
Jedná se o dvouletý interní projekt ČVUT s číslem SGS13/144/OHK3/2T/13, který se orientuje na dva cíle. Prvním cílem je vývoj plnohodnotného INS primárně využívajícího jen přesné inerciální senzory, tj. vláknových laserových gyroskopů DSP-3100 (výrobce KVH) a přesných quartz akcelerometrů INN-204 (výrobce Innalabs), viz obr. 6. Vývojem plnohodnotného INS se rozumí výzkum a vývoj algoritmů pro výpočet polohových úhlů a pozice bez použití dalších pomocných měřicích systémů. Pro dosažení přesností srovnatelných se stávajícími průmyslovými řešeními INS systémů, tj. nepřesnost v pozici do 1 NM/hod., je nutné implementovat kompletní mechanizaci výpočtů navigační rovnice bez jakýchkoliv zjednodušení. Druhým cílem je vývoj miniaturizované navigační jednotky využívající MEMS senzorů a miniaturních měřicích systémů s širokým potenciálem aplikovatelnosti. Takovýto systém se bude vyznačovat unikátní koncepcí integrace moderních senzorů a systémů s metodami zpracování dat obsahujícími algoritmy pro zpřesnění výpočtů polohových úhlů a pozice. Aplikovatelnost obou typů plánovaných navigačních jednotek bude široká a to od malých či středních letadel, přes navigaci detektoru kovů, navigaci mobilních prostředků v podobě UAV či pozemních robotických prostředků až po hand-held zařízení pro osobní navigaci při pohybu ve městech i mimo něj.
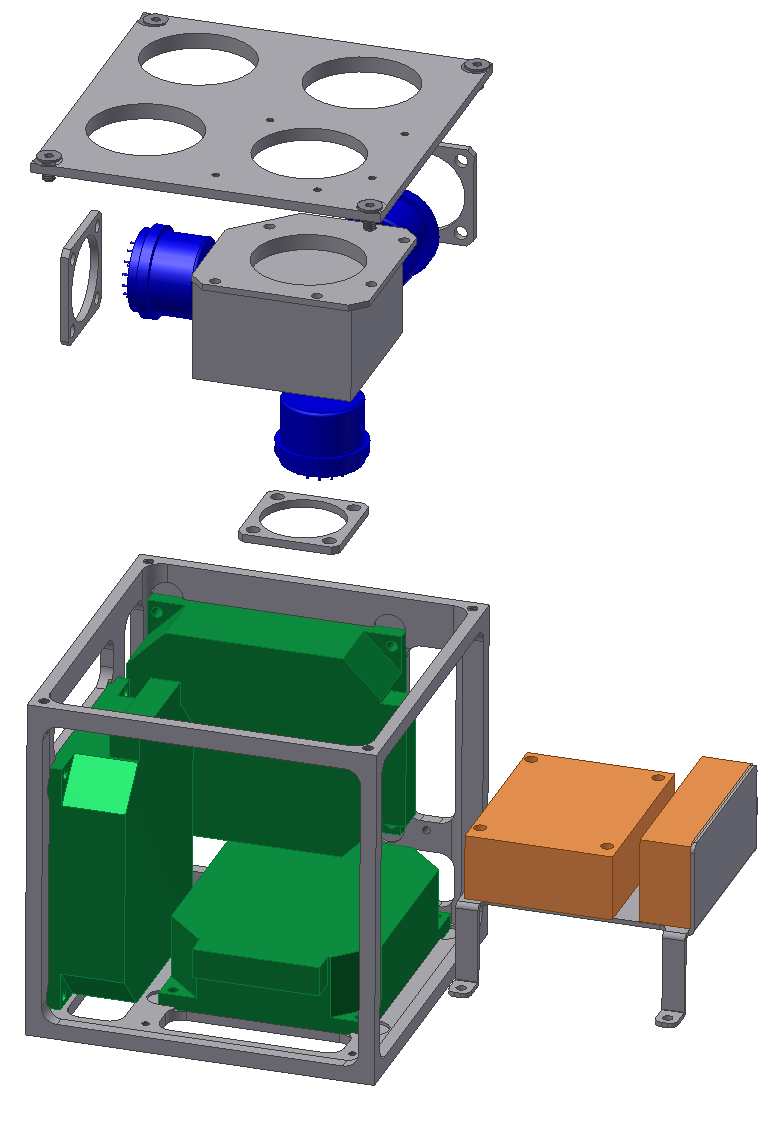



Obr. 6 - Realizace "Tactical grade" inerciálního navigačního systému (zleva): koncepční uspořádání, quartz akcelerometr INN-204, rám s uchycením akcelerometrů, uchycení gyroskopů DSP-3100, realizace "Tactical grade" inerciálního systému.
Kalibrace a testování inerciálních senzorů a měřicích systémů
Vývoj kalibrační All-In-One platformy a algoritmů pro kalibraci tříosých akcelerometrů, magnetometrů a senzorů úhlových rychlostí pomocí levné nemagnetické kalibrační platformy s využitím referenčního systému s vláknovým gyroskopem pro přesné odměřování úhlové rychlosti a tím i úhlu podél vertikální osy. Hlavním úkolem tohoto snažení je vývoj časově nenáročných a cenově příznivých metod pro kalibraci daných senzorů a systémů. Naše pracoviště dále provádí kalibrace náklonoměrů, teplotní kalibrace senzorů a testování na vliv vibrací. All-In-One platforma je schematicky zobrazena na obr. 7, která vychází z dříve používaného náklonného stolku, též na obr. 7. Kalibrační platforma pro přesná měření úhlů náklonu používá přesný náklonoměr HCA528T s analogovým výstupem, pro který bylo nutné navrhnout obvody pro zpracování, viz obr. 8.
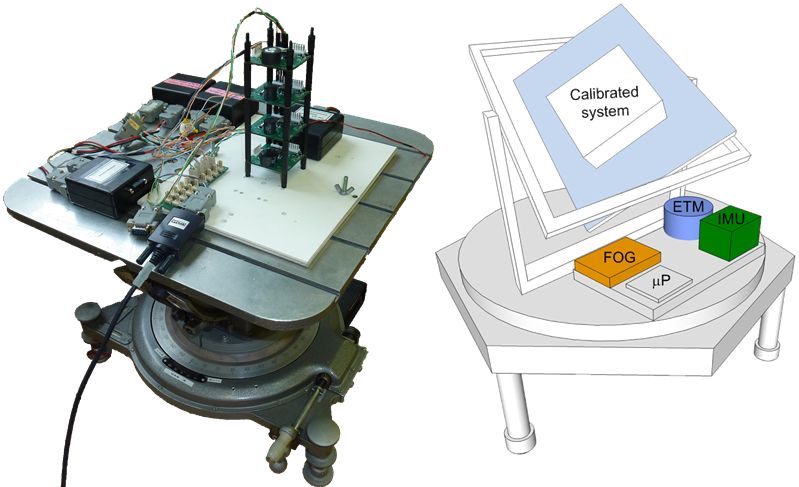
Obr. 7 - Systémy pro kalibraci měřicích systémů, náklonný stolek (vlevo), All-In-One kalibrační platforma (vpravo)

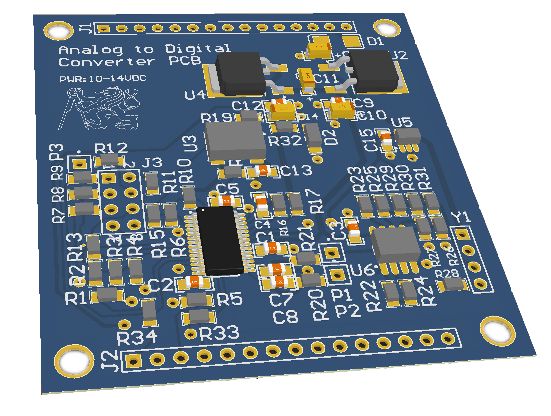
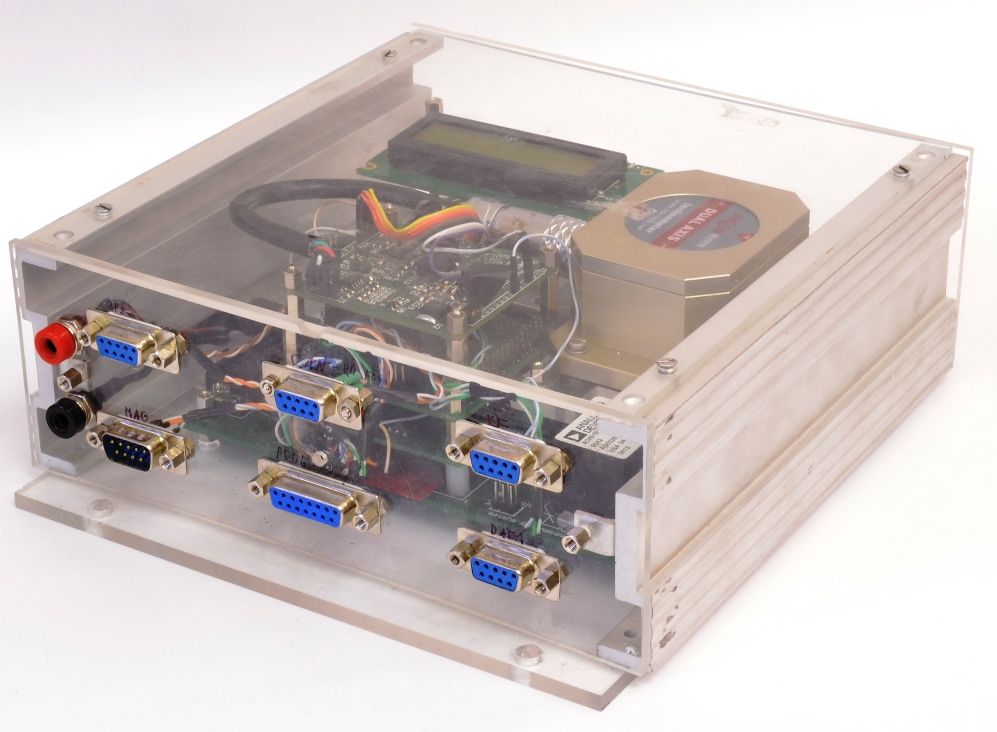
Obr. 8 - Systémy pro přesná měření úhlů náklonu, náklonoměr HCA528T (vlevo), DPS pro zpracování dat (uprostřed), autonomní systém pro měření pozice a orientace s optickým gyroskopem (vpravo)
Kdo financuje náš výzkum
- SGS10/288/OHK3/3T/13 - Modulární systém pro určování pozice a orientace v prostoru (2010-2012)
- TA02011092 - Výzkum a vývoj radiolokačního mapovacího a navigačního systému (2012-2014)
- VG20122015076 - Využití dvoustaničního dálkoměrného systému pro ochranu perimetru (2012-2015)
- SGS13/144/OHK3/2T/13 - Moderní metody ve vývoji inerciálních navigačních systémů (2013-2014)
S kým spolupracujeme
- OPROX a.s. - vývoj navigačních systémů a bezpečnostních aplikací
- Hacker Model Production s.r.o. - výroba UAV, 3D tisk
- DevCom Praha s.r.o. - vývoj a výroba palubních přístrojů
- PEGASUS Network - 25 evropských univerzit zabývajících se oblastí AEROSPACE - spolupráce na bázi výměnných stáží, společných projektů, zvyšování úrovně výuky
- Skylife Engineering - vývoj kalibrační platformy pro navigační systémy
Vybrané publikace
- Accuracy Based on Magnetometer and Accelerometer Calibration In: Acta Physica Polonica A. 2012, vol. 121, no. 4, p. 945-949. ISSN 0587-4246.
- Nováček, P. - Roháč, J. - Ripka, P.: Complex Markers for a Mine Detector. IEEE Transactions on Magnetics. 2012, vol. 48, no. 4, p. 1489-1492. ISSN 0018-9464.
- Roháč, J. - Šipoš, M. - Šimánek, J. - Tereň, O.: Inertial Reference Unit in a Directional Gyro Mode of Operation In: IEEE SENSORS 2012 - Proceedings. Piscataway: IEEE Service Center, 2012, p. 1356-1359. ISBN 978-1-4577-1765-9.
- Roháč, J. - Reinštein, M. - Draxler, K.: Data Processing of Inertial Sensors in Strong-Vibration Environment In: Intelligent Data Acquisition and Advanced Computing Systems (IDAACS). Piscataway: IEEE, 2011, vol. 1, p. 71-75. ISBN 978-1-4577-1426-9.
- Reinštein, M. - Roháč, J. - Šipoš, M.: Algorithms for Heading Determination using Inertial Sensors In: Przeglad Elektrotechniczny. 2010, vol. 86, no. 9, p. 243-246. ISSN 0033-2097.
- Ripka, P. - Nováček, P. - Reinštein, M. - Roháč, J.: Position Sensing System for Eddy-current Mine Imager In: EUROSENSORS XXIV - Proceedings [CD-ROM]. Linz: Elsevier BV, 2010, p. 276-279. ISSN 1877-7058.
- Reinštein, M. - Šipoš, M. - Roháč, J.: Error Analyses of Attitude and Heading Reference Systems In: Przeglad Elektrotechniczny. 2009, vol. 85, no. 8, p. 114-118. ISSN 0033-2097.
- Alam, M. - Narenathreyas, K.: Oblique Wing: Future Generation Transonic Aircraft. World Academy of Science, Engineering and Technology. 2014, vol. 8, no. 5, p. 75-78. ISSN 1307-6892.